

 12/22
12/22 】
】





全國第一 專業ROS機器人培訓中心
★ 基於ROS2你可以自己從頭到尾設計出一個嵌入式/機器人軟硬體系統
理由1 : 機器人產業快速成長,商機蓬勃發展

全球機器人產業快速發展,而ROS(Robot Operating System,機器人操作系統)是開發機器人的主流技術之一,目前已有許多機器人公司採用了ROS系統來開發創新產品,如ClearPath、Rethink、Unbounded、Neurala、Blue River、Big-i,最典型的就是Willow Garage的PR2機器人。Nvidia、Bosch、高通、英特爾、寶馬以及大疆等大公司也紛紛推出ROS週邊產品。
理由2 : 國際大廠相繼投入機器人開發平台,機器人市場前景看俏
國際巨頭在 2018 ~2019年間,前後推出機器人系統,包括高通(Qualcomm)機器人 RB3 平台(2019 年 2 月發表)、微軟(Microsoft )的Windows 10 ROS1(2018 年 9 月發表)、亞馬遜的 AWS RoboMaker(2018 年 11 月發表)、優必選的 ROSA(2018 年 9 月發表)、以及獵豹的 Orion OS(2018 年 3 月發表)。代表大廠也十分看好機器人市場的發展。
理由3 : 國家政策全力支持,開發者將享有更多資源

從科技部的政策來看,為了結合台灣既有產業優勢,讓AI加速台灣產業升級,政府投入大量資源來發展AI,以期能成為全球供應鏈中的重要一環。而機器人是AI落地的重要方向之一,特別是在製造、醫療照護等領域的發展。
理由4 : 高效跨領域技術整合框架,幫助你快速整合不同技術
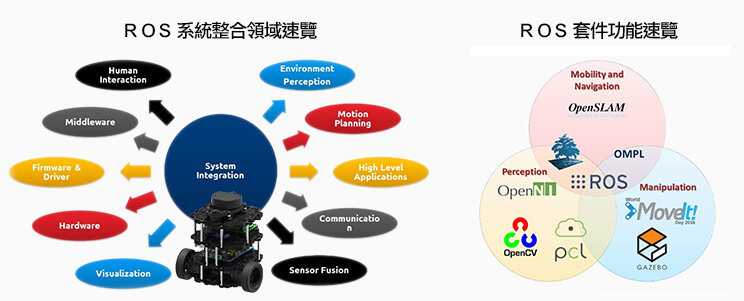
ROS擁有豐富的社群資源,發展迄今,已經整合感測器、視覺、人機互動、硬體、韌體等領域的技術,因此,一旦基於ROS你就可以整合全世界的研發成果,快速打造專屬的產品。舉例來說,如果你想投入工業4.0的領域,透過ROS的OpenSLAM、MoveIt等工具,你就可以快速實作出具有抓取功能的AGV(Automated Guided Vehicle,自動導引車)產品原型。
理由5 : 容易操作的可視化套件,幫助你提高專案開發效率

ROS擁有功能強大的可視化工具像是GUI工具rqt、3D可視化工具 rviz、機器人模擬器 gazebo、資料存儲/重播功能rosbag,方便你進行資料記錄、分析、模擬工具,方便調試。不用花太多的成本就可以提升你的開發效率。
 <ROS小知識>你不可不知的6個ROS的強大特性(點選展開)
<ROS小知識>你不可不知的6個ROS的強大特性(點選展開)
-
點對點設計
ROS使用點對點的架構進行程序之間的通信,使得各個節點(程序)可以直接向任何其他節點發送和接收消息。
-
支援多種程式語言
支援多種程式語言,允許開發者以最適合任務需求的語言開發。
-
輕量化架構
ROS框架盡量保持輕量及最少限制,使其易於與其他軟體框架整合。
-
工具導向
ROS提供了一系列工具幫助開發者創建、測試和管理機器人應用程序。這些工具包含模擬器等工具,可提高開發與測試效率。
-
開放原始碼
ROS遵從BSD協議,使開發者可以清楚的查看、自由的使用原始碼,並可以根據不同的系統及硬體環境對原始碼進行修改,或者進行二次開發。
-
強大的社群資源
ROS提供了廣泛的社群資源,實現以機動性、操作控制、感知為主的機器人功能。
為了幫助你更有效率地學會ROS機器人系統開發的核心技術,本課程由具有豐富機器人開發經驗的業界工程師親授,強調實務教學,深入淺出引領你了解ROS重要觀念+實戰ROS程式。實作中搭配艾鍗獨家研發Raspberry Pi擴充板,真正落實「做中學,學中做」,幫助每一位學習者都能自然而然且無壓力地培養與業界接軌的ROS技能。課程特別設計成兩階段,在第一階段,將教你在電腦中建置基於Linux Ubuntu的ROS系統,並能學會機器人主機(Raspberry Pi)與各部位進行通訊,讓你逐漸掌握ROS系統開發必會的指令來進行重要控制。在第二階段,講師以ROS認證機器人-Turtlebot Burger進行演示,教你進階應用包含如何結合第一部分的基礎,製作屬於自己的套件進行機器人的控制,也同時教導如何設計客製化的GUI介面,讓最終你的ROS產品有獨一無二的樣式。用ROS技術來為自身職能加分,增強開發實戰力!

1.本班學員獨享艾鍗獨家研發擴充板
為了傳達正確的ROS系統開發的學習觀念與重點,艾鍗獨家設計I/O子板,以擴充原Pi板的功能,並對其中所有軟硬體控制原理進行透徹解說,使你可以透過主題式Lab,實踐ROS系統開發的核心技術與架構。

ü內建ADC晶片,可讓Raspberry Pi3連接類比感測器。
ü具硬體PWM訊號腳及驅動電路,使Raspberry Pi3可以直接連接DC馬達與伺服馬達。
ü內建PL2303晶片,可直接連接PC的USB當作Debug Console。
ü內建IR紅外線發送器及接收器,讓Raspberry Pi3當作多媒體的應用平台或IR遙控器。
ü可連接OLED顯示狀態資訊。
ü可連接光敏電阻進行光度感測。
ü可連接2.4GHz無線網路模組進行無線通訊。
ü內建G-Sensor可感測Raspberry Pi3在X, Y, Z軸方向的移動狀態。
▶ ROS on Raspberry pi 搶先看
2.資深機器人開發工程師親授
具有豐富開發經驗的資深工程師親自教您產業實務,快速掌握關鍵技術,縮短摸索碰壁的時間。引領你了解ROS的架構原理、程式設計流程、開發環境與蓬勃發展,領略為何至今仍以ROS為主?體會ROS的無窮潛力及強大用途!
3.完整程式碼開發實戰
本課程以實務為主=觀念+實戰(寫ROS程式)因此不會有任何深奧難懂的數學、資料結構、演算法等,幫助你快速建構開發觀念,透過完整開發程式碼,提高學習效率,快速提升職能,縮短開發時間。

- 了解ROS生態系。
- 理解ROS1和ROS2的差異。
- 了解如何安裝ROS
- C++如何與ROS2結合開發。
- 學習ROS2的Publisher 與 Subscribe的發送和接收。
- 學習ROS2的Service 與 Client的發送和接收。
- 撰寫ROS2的launch file的呼叫。
- 實作ROS2與其他裝置連線。
- 實作樹莓派與ROS。
- 實作修改與製作ROS的GUI。
- 製作增加簡易的GUI按鈕。
- 製作將收到的資訊顯示在GUI上。
- 從ROS機器人Turtlebot操作中,學會ROS套件的整合應用。
- 知道未來遇到不同的ROS套件,要如何去分析和使用。

- 想學習如何利用ROS快速設計智能機器人。
- 已開始接觸ROS相關開發,但仍對ROS開發難以掌握。
- 想在最短時間內快速掌握ROS開發技術的重點的你。
- 了解如何在ROS環境下開發相關機器人程式。

- ROS生態系介紹
- ROS導論
- ROS的特點與優勢
- ROS1與ROS2介紹
- Ubuntu、C++、Python與ROS2
- Ubuntu環境介紹
- ROS2設定與安裝
- 如何使用Shell 加速ubuntu程式的安裝
- 簡介ROS2的Modern C++ 與傳統C++的差異
- 如何使用C++寫ROS2專案
- 如何使用Python寫ROS2專案
- ROS2 基礎
- Publisher 與 Subscribe 實作
- Service 與 Client實作
- ROS launch 教學
- ROS2的連線設定
- ROS2的debug方法
- 製作自己的package
- 製作自己的srv和msg檔案
- ROS2與IOT板
- 利用ROS和樹莓派進行IOT板控制
- ROS Pi image燒錄
- 於Raspberry pi實作ROS2
- ROS節點設計:I/O控制
- ROS遠端控制Pi I/O 子卡
Part II : ROS2系統程式與GUI開發實作
- 基礎GUI
- 常見的GUI說明
- GUI的選擇
- 自訂GUI

- 利用拖曳的方式製作簡易的GUI畫面
- 設計簡單的GUI按鈕
- 設計對話框
- 設計輸入元件
- 自訂GUI與ROS
- 連結ROS2與自定義的GUI
- 將收到的訊息顯示在自定義的GUI中
- 利用自定義的按鈕送出訊號到其他的ROS裝置
- 如何在桌面上啟動GUI
- ROS2與Turtlebot(自走車)
- Turtlebot (自走車)與常用的套件
- 如何設計自己的套件控制Turtlebot (自走車)
- 設計自己的GUI控制自走車
Part III : 結尾
- ROS的未來與工作
- 如何快速掌握不同的ROS套件
建議自備器材:
1.讀卡機x1
ROS趨勢

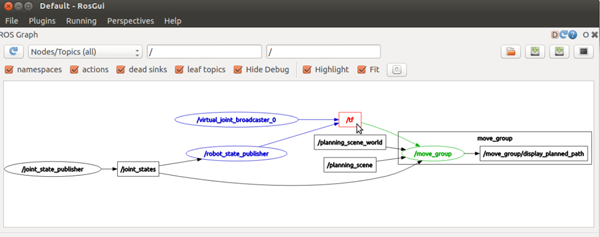
ROS開發架構

SLAM教學

講師解答學生問題

| LDA 應用實例 |
Navigation 應用實例 |
 |
 |
|
ROS Gmapping and Cartographer SLAM demo |
SLAM Demo |
 |
 |
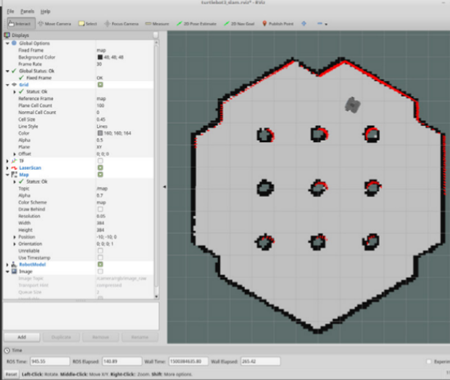
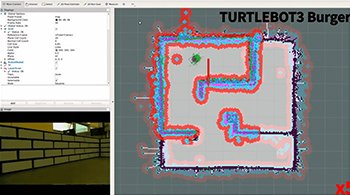
▶ 建立2D地圖的過程:2D online gmapping SLAM
▶ 根據2D地圖進行2D導航:2D Navigation with Known map
▶ Navigation避開動態障礙物

Tim
- 輔仁大學應用科學與工程研究所博士
- 知名上市電子消費品大廠機器人研發部門資深工程師
- 機器學習 / 機器人開發 / 密碼學 / 影像壓縮 / 數位訊號處理 / 生醫資訊/生醫影像處理

Sam
- 國立中正大學資訊工程學系碩士
- 12項ROS專案團隊負責人
- 專長 : ROS機器人系統開發 / Linux / 深度學習 / 資料結構與演算法

Bob
- 中央大學太空所碩士
- 知名上市電子消費品大廠影像事業部研發工程師
- ROS機器人開發 / 無人機韌體開發 / OpenCV影像處理與電腦視覺開發 / Linux嵌入式系統

Jay
- 台北科技大學機電整合研究所碩士
- 知名上市電子消費品大廠軟韌體研發部研發工程師
- ROS機器人開發 / OpenCV影像處理與電腦視覺開發 / Linux嵌入式系統 / 機器學習 / 深度學習

Leo
- 國立成功大學電機工程研究所碩士
- 知名機器人股份有限公司 高級工程師
- ROS機器人開發 / 機器手臂 / 機器人視覺定位 / Linux / C++ / Python / OpenCV
- 機器人軟體研發工程師
- 智慧型協作機器人產品研發工程師
- 機器人產品開發工程師
- 機器人視覺研發工程師
- 嵌入式系統/機器人應用工程師
- 演算法感測融合開發工程師(Sensor Fusion Algorithm Developer)

More

- 林同學:工作實用
- 柯同學:課程所學的ROS內容,讓我在碩士進行的研究上更加上手。
- 黃同學:工作上用人臉辨識技術完成門禁人臉辨識專案
- 傅同學:輔助我完成碩/博士研究
- 張同學:能清楚學習
- 謝同學:很好的課程,老師教學能力很好 可解決同學線上提問
- 馮同學:不論自我學習或提升工作技能, 都推薦來參加.
- 陳同學:講師態度認真,適合想入門ROS的朋友參加
- 黃同學:快速入門ROS原理 對ROS的了解增加了一些運作上的理解
- 陳同學:專業
- 徐同學:good job, keep going
- 謝同學:課程內容充實
歡迎企業包班內訓,立即洽詢(02)2316-7736!!
若您希望對本課程有更多了解,歡迎留下您的資料,或撥諮詢專線(02)2316-7736,課程顧問將竭誠為您服務喔!



1.關於Turtlebot3 burger介紹▼
TurtleBot的目的是給入門級的機器人愛好者或從事移動機器人程式開發者提供一個基礎平台,讓他們直接使用TurtleBot自帶的軟硬體,專注於應用開發,避免了設計草圖、購買、加工材料、設計電路、編寫驅動、組裝等一系列工作。藉助該機器人平台,可以省掉很多前期工作,只要根據平台的軟硬體接口,就能開發出所需的功能。
TurtleBot可以説是ROS中最為重要的機器人之一,它伴隨ROS一同成長,一直都作為ROS開發前沿的機器人,幾乎每個版本的ROS測試都會以TurtleBot為主。而且在ROS社群中有大量關於TurtleBot的相關資源,讓TurtleBot成為ROS支持度最好的機器人之一。

2.什麼是ROS (Robot Operation System)?▼
ROS是一個Open Source(開源)的機器人開發平台,在這個架構下,讓機器人各大領域Navigation、Manipulation、Perception、Cognition等,建立共通的使用平台,全世界的研究員都可以在這個平台上分享各種機器人相關研究的資源和演算法,加快各種類型的機器人開發。 舉一個例子,假設今天東大的研究團隊做出了一個超強人工智慧,你就可以直接拿來用,站在他們的肩膀上繼續走。 (1) ROS是一個作業系統 : 根據定義作業系統是用來管理計算機硬體與軟體資源,並提供一些公用的服務的系統軟體。而ROS也自稱是一個OS。ROS則是對機器人的硬體進行了封裝,不同的機器人、不同的傳感器,在ROS里可以用相同的方式表示(topic等),供上層應用程式(運動規劃等)調用。 (2) ROS是一種跨平台模塊化軟體通訊機制 : ROS用節點(Node)的概念表示一個應用程式,不同node之間通過事先定義好格式的消息(Topic),服務(Service),動作(Action)來實現連接。 (3) ROS是一系列開源工具 : 擁有超強大的3D可視化工具,可以顯示機器人模型、3D電影、各種文字圖標、也方便進行二次開發
3.ROS能否裝到虛擬機裡?▼
答:一般來說是可以的,但是建議裝個雙系統,用Ubuntu專門跑ROS。
4.什麼是SLAM(即時定位與地圖構建)?▼
SLAM (simultaneous localization and mapping),即時定位與地圖構建。利用SLAM技術,可以讓機器人在未知的環境裡實時地知道自己在哪裡,並同步繪製環境地圖。在機器人的定位、跟蹤和路徑規劃技術中,SLAM都扮演了核心角色。沒有SLAM的機器人就好比在移動網際網路時代不能上網的智慧型手機,發揮不了重要作用。而要利用SLAM技術,首先需要機器人配置至少一個測距裝置,通過測距裝置獲取機器人周圍環境的信息。目前比較常見的測距裝置主要有雷射測距、超聲波測距和圖像測距。
5.請問學習ROS須具備什麼背景知識呢?▼
(1).具創客精神(不怕失敗、樂意動手實作、會自行上網找尋解決方法),對於開源平台Raspberry Pi相關開發有興趣。
(2).具備C++或是Python程式撰寫能力 。
(3).具Linux(Ubuntu)使用經驗 (會基本常用指令操作)。若你想要更熟悉Linux操作,我們亦提供Linux入門職能精修供你進修。
(4).具導航/路徑規畫演算法、視覺相關演算法或是AI應用相關背景尤佳。
6.如果對Linux不熟悉怎麼辦?▼
其實學習ROS並不難,而很多學員遇到的問題在於對於Linux不熟悉。這個只能邊用邊學了,遇到問題也要善用Google ,基本上這些問題都能在Google中找到答案。 若你想要更熟悉Linux操作,我們亦提供Linux入門職能精修供你進修。