|
由艾鍗科技培訓之「嵌入式Linux軟韌體設計工程師養成班」,經專業且密集的培訓,屆已結訓,於2013年9月18日(三)於台北國際會議廳舉辦「專題成果發表會暨廠商聯合徵才活動」,透過成果發表,各企業單位實際觀摩本班之培訓成果,現場與學員互動與技術交流。企業們現場向學員們提供各項優渥職缺需求,找到優秀嵌入式專才與團隊新血,提供即戰力的研發人才一直是艾鍗創辦以來的理念,提供一個良好的教學環境與品質更是我們所堅持的立場。受訓期間的密集培訓,講師不僅實際帶領學員專題製作,並以「做中學,學中做」的教學方式,以專題製作為導向的教學實作模式,透過讓學員實際的開發經驗,除了讓學員學習到問題解決的方法,更讓學員能夠成為業界所需的即戰力人才! 為資訊產業人才培訓帶來更多的貢獻與付出,也將是現在與未來,艾鍗努力不懈的原動力與理由! |
自平衡機器人之研究與實作 The Magic behind Self-Balancing Robot我們專題的靈感動機來自於Dean Kamen發明的兩輪電動代步車-Segway。當人踏在上面時,可以自動平衡保持直立,且會根據整體重心的改變而產生前進或後退的靈活移動。因停靠方便、外型酷炫、操作容易,在歐美地區已造成一股流行。主要的目標是完成一具有自我維持平衡能力的兩輪機器人,請詳見下方示意圖。 |
|





 |
我們以微控器 STMicroelectronics STM32-F3 (ARM Cortex-M4 core @72MHz ) 當作開發平台,左、右兩輪各搭配有齒輪箱的直流馬達,底板正中央放置慣性感測元件,最上層安裝可充電式電池組。藉由Accelerometer 和 Gyroscope分別量測車身的傾斜角&角速度,並利用Encoder量測馬達轉動的位置或速度,根據前三者加總的即時資訊當成PID控制器的輸入,建立兩輪車各種模式的狀態;經運算後再以PWM訊號和驅動器輸出調整馬達轉速,使機器人具備平衡、同步、定速定位、前進/後退、左右轉彎等功能。第一階段為實現保持動態平衡以及兩輪同步操作、第二階段為實現藍芽遙控的前進/後退和差速轉向。過程中整合了感測物理量的擷取、Kalman濾波器的訊號處理、馬達驅動&控制的技術,充份地展現了韌體&硬體的緊密結合。 |
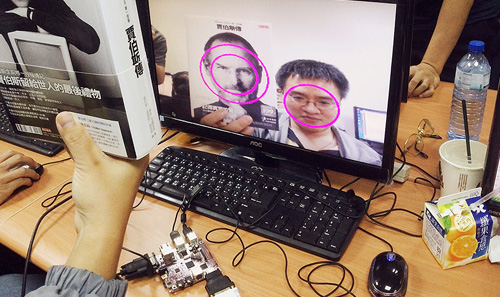
嵌入式系統研究: 以OpenCV實現即時之人臉偵測與辨識系統本專題利用Beagleboard xM (AM37x 1GHz ARM Cortex-A8) 強大的運算能力,結合OpenCV完成人臉偵測及識別功能。OpenCV由Intel公司創始與開發,可用於圖像處理、計算機視覺、運動跟蹤以及模式識別。人臉偵測、識別為OpenCV其中重要應用之一,人臉辨識大量被使用和研究,因為它不需要穿戴額外的裝置,只要透過簡單的攝影裝置,即可取得辨識所需的資料。 |
|



|
|
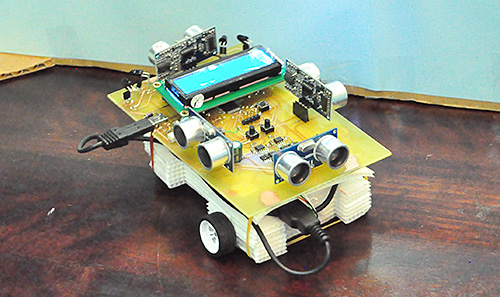
嵌入式系統研究: 以OpenCV實現即時之人臉偵測與辨識系統本專題主要研究自動化相關的基礎技術,係藉由自行設計電路板與車體,實際整合電子、電機、機械、軟體等基礎知識,落實本次課程的學習。系統架構以PIC18微控制器作為主要控制核心,加上馬達驅動電路以驅動2個具減速器的直流馬達,來實現車體的前後輪控制。本組構思依路徑演算法,利用超音波測距,讓車體避開障礙,自動轉彎,使車體自尋迷宮的路徑解。 |
NFC技術應用於學員簽到資訊系統設計由於每天上課都要做上午及下午的簽到簽退,且4次簽名都是採用紙本作業,過程既不便利亦不環保,本組想實作個一個電子簽到系統來取代每天繁瑣的簽到簽退過程。本系統利用Raspberry Pi平台、NFC Reader、SQLite資料庫、網頁整合成電子簽到系統。上課學員藉由刷卡將簽到資訊登錄至資料庫中,而管理者可藉由網頁方式管理與監視簽到資訊。 |
|


|
|
嵌入式Linux系統裝在SD上本組專題研究目標是如何將整個嵌入式Linux系統,包含Uboot、Kernel、Root filesystem整個建置於SD卡上並且整個系統可直接從SD卡上開機,使得板子完全不須要 NOR Flash 或 NAND Flash。 |



|
我們首先要克服以下幾個問題: CPU 如何直接從外部裝置SD Card開機?若可以從SD card開機,U-boot要放在SDcard的那個位置?接著Linux Kernel和Root filesystem 又該放在SDcard那個位置?Kernel如何找到檔案系統?如何讀取SD卡?若是SDHC卡會有不一樣的結果嗎? |
 |
|
|
遠端無線投影伺服器研究與實作本專題主要以Remote Framebuffer 技術來實現遠端影像傳輸,將遠端機器如PC或智慧型手機畫面傳輸到Raspberry Pi平台上再透過HDMI方式將畫面輸出到顯示設備上。另外,我們再利用USB WiFi Dongle (Realtek RTL8188 chipset)及DHCP Sever使Raspberry Pi成為WiFi AP,完成一個遠端無線投影伺服器的基本架構。本次專題學習到網路傳輸原理及遠端桌面控制的原理。 |


建構於Raspberry Pi上之SIP網路電話使用三台Raspberry Pi開發平台來實作VoIP電話專題,其中一個擔任SIP Server角色,並使用Asterisk完成。Asterisk是一個開放原始碼軟體的IP PBX系統,它支援 SIP、MGCP 與 H.323協定並且相容於大部分的SIP電話。另外2台作為SIP Client,我們主要的開發就是利用PJSIP函式庫來完成VoIP電話。 |
|



|
|
基於嵌入式Linux系統之行車紀錄器實現以嵌入式Linux建構一個行車記錄器系統,其主要功能為記錄駕駛狀態,以便在交通糾紛時提供事故發生的證據。本專題之實作,以支援UVC Camera作為影像來源透過Linux V4L2介面,擷取影像資料透過FFMPEG的轉換成Motion JPEG的格式並寫入至SD card上並同時將所擷取影像資料輸出至LCD上。經由此次的專題,我們熟悉了Linux Thread的處理, Linux V4L2 視訊串流資料處理及Linux Frame buffer的處理等技巧。 |




參加廠商永大機電工業股份有限公司、廣達電腦股份有限公司、和碩聯合股份有限公司、 |